Product
StepSERVO & Drive

StepSERVO Motor & Drive
StepSERVO Motor & Drive with High-Precision Encoder
DC Power +24V~+48V
Can be used in two ways: Open-Loop / Closed-Loop
DC Power +24V~+48V
Can be used in two ways: Open-Loop / Closed-Loop
Details
Closed loop control is possible using the StepSERVO Motor with a high-precision encoder.
1. System configuration diagram
 |
2. Step SERVO application
| - 3D printer - Robot - Semiconductor equipment - Inspection equipment - Pharmaceutical industry | - Material transporter - Logistics equipment - Processing/logistics/inspection/measurement automation equipment - Small machine tools |
3. Step SERVO Features
- Uses DC 24V ~ 48V power
- Can be used in two ways: Open-Loop / Closed-Loop
- There is no step-out phenomenon as the current position is determined through the high-precision encoder mounted on the motor.
- Optimal position correction by always checking the current position with encoder feedback
- Easy gain adjustment provides optimal performance even under low rigidity loads
- Maximize motor efficiency by automatically adjusting current under load
- Improves equipment sensitivity and reliability by reducing heat loss by up to 80%
- Detection of overvoltage, overcurrent, overtemperature, and phase short
4. High-Speed Synchronous Control of Step Servo System
5. External dimension of Step SERVO drive
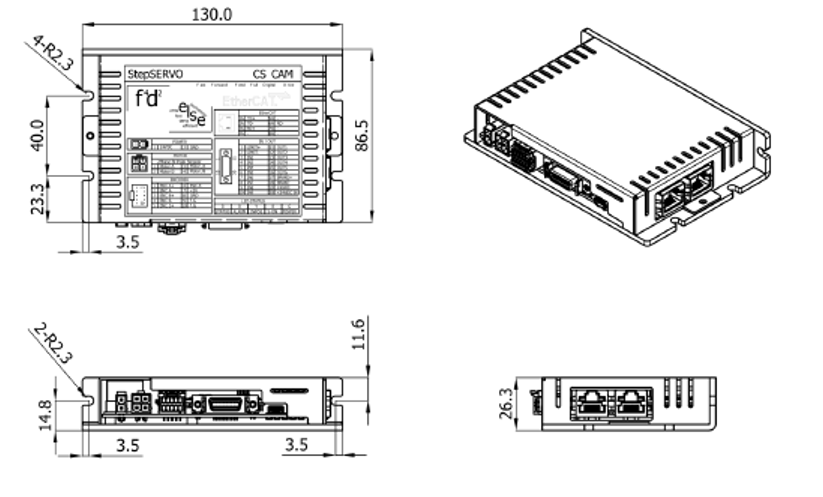 |
6. Step SERVO drive model number guide
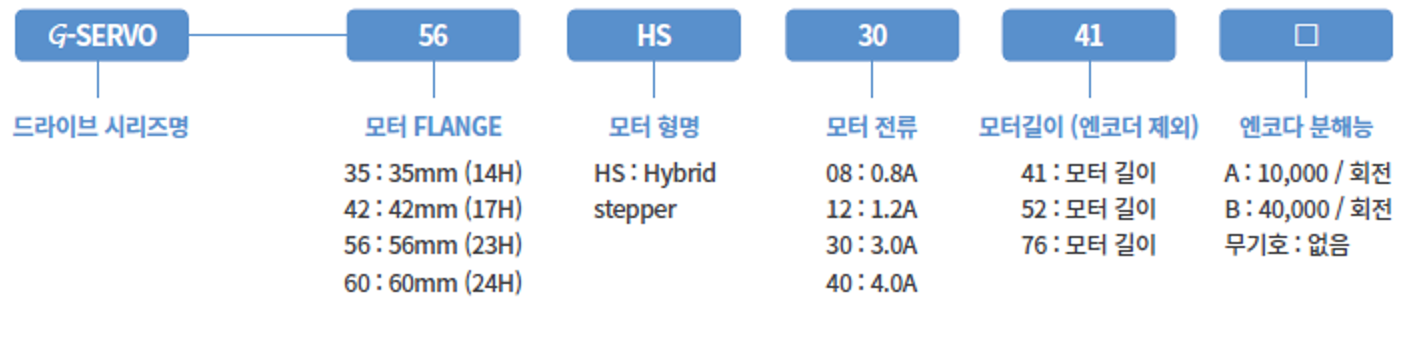 |
| □ | Mortor | Length | Holding torque | Drive | |
| □ 35 | 35HS-0828A | 35HS-0828B | 28(46) | 0.16 Nm | G-SERVO-PULSE G-SERVO-MODBUS G-SERVO-ECAT |
| 35HS-0833A | 35HS-0833B | 33(51) | 0.2 Nm | ||
| 35HS-0836A | 35HS-0836B | 36(54) | 0.24 Nm | ||
□ 42 | 42HS-1235A | 42HS-1235B | 35(53) | 0.32 Nm | |
| 42HS-1241A | 42HS-1241B | 41(59) | 0.44 Nm | ||
| 42HS-1261A | 42HS-1261B | 61(79) | 0.65 Nm | ||
| □ 56 | 56HS-3041A | 56HS-3041B | 41(59) | 0.6 Nm | |
| 56HS-3052A | 56HS-3052B | 52(70) | 1.0 Nm | ||
| 56HS-3076A | 56HS-3076B | 76(94) | 1.5 Nm | ||
| □ 60 | 60HS-4045A | 60HS-4045B | 45(63) | 0.75 Nm | |
| 60HS-4056A | 60HS-4056B | 56(74) | 1.1 Nm | ||
| 60HS-4088A | 60HS-4088B | 88(106) | 2.7 Nm | ||
Specifications
Specification of Step SERVO drive
| Motor | □ 35mm | □ 42mm | □ 56mm | □ 60mm | |
| Drive type | G-SERVO-PULSE G-SERVO-MODBUS G-SERVO-ECAT | G-SERVO-PULSE G-SERVO-MODBUS G-SERVO-ECAT | G-SERVO-PULSE G-SERVO-MODBUS G-SERVO-ECAT | G-SERVO-PULSE G-SERVO-MODBUS G-SERVO-ECAT | |
| Input voltage | 24VDC ~ 48VDC ±10% | ||||
| Control method | Closed-Loop control, Open-Loop control, (ARM core + Motion controller) | ||||
| Power Consumption | Up to 600mA (excluding motor current) | ||||
| Usage environment | Temperature | Operation: 0 ~ 50℃, Storage: 0 ~ 70℃ | |||
| Humidity | Operation: 35 to 85%RH (no condensation), Storage: 10 to 90%RH (no condensation) | ||||
| Vibration | 0.5G | ||||
| 기 능 | Encoder | 10,000 / per revolution, 40,000 (option) / per revolution | |||
| Resolution | 1200, 1600, 2000, 3000, 5000, 9000, 10000, 20000, 40000 (SW Setting) | ||||
| RPM | Max. 3,000rpm | ||||
| Maximum input | 500kHz (Duty 50%) | ||||
| Protection function | Position tracking error, motor connection error, motor voltage error, input voltage error, overcurrent error, overload error, temperature error, motion controller temperature error | ||||
| Status display | Power, in-position, arlam | ||||
| In-position settings | SW setting (USB) | ||||
| Gain setting | |||||
| Electric gear ratio | |||||
| Pulse input method | 1 pulse (DIR / PULSE), 2 pulse (CW/CCW) settings (USB) | ||||
| Rotation direction setting | SW setting (USB) | ||||
| Speed/position command | 1 Pulse train (Differential) input (DIR/PULSE), (CW/CCW) | ||||
| I/O signal | Input signal | 1 Pulse train (Differential) input (DIR/PULSE), (CW/CCW) SERVO-on, ALARM-RESET: Insulation method using photocoupler | |||
| Output signal | In-position output, drive alarm output, encoder output (A+, A-, B+, B-, Z+, Z-) RS-422 line drive output | ||||
Download
| Division | File name | Download |
|---|